
東京で激化する「レベル4」自動運転競争
2026年現在、日本の自動運転市場、特に東京を中心とした「ロボタクシー(無人タクシー)」の覇権争いがかつてない盛り上がりを見せています。
ホンダは小田原での実証実験を経て東京都心での商用サービスへ向け最終調整に入り、米アルファベット傘下のWaymo(ウェイモ)も日本交通(GO株式会社)と連携し、複雑な東京の交通網への適応テストを佳境に迎えています。
しかし一方で、イーロン・マスク率いるテスラの完全自動運転機能「FSD(Full Self-Driving)」の日本における認可は、まだレベル2の実証段階に留まっており、本格的なレベル4導入は2027年以降にずれ込む見通しです。この差は一体どこから生まれているのでしょうか?
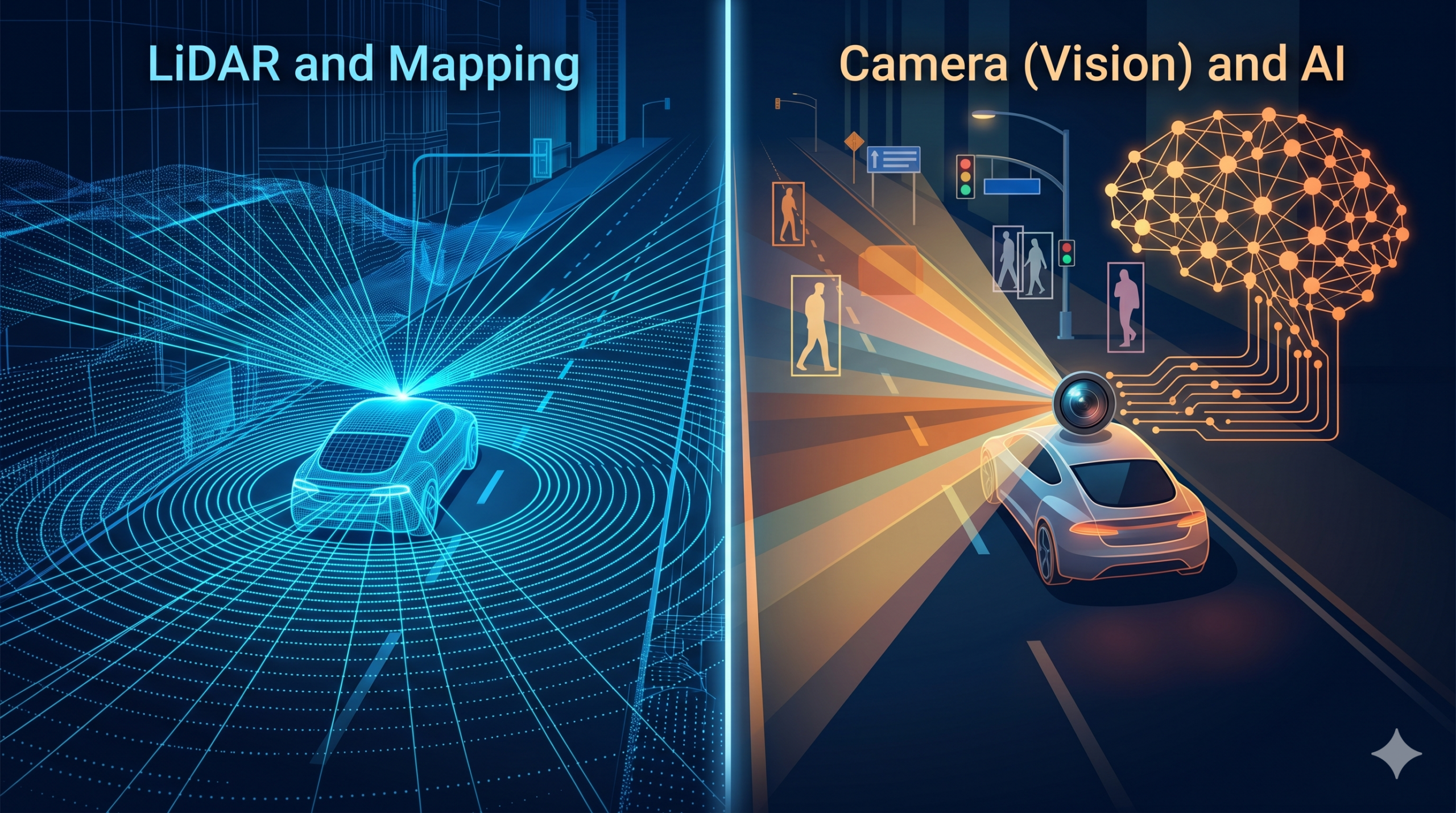
決定的な技術の違い:LiDAR vs カメラ(視覚)
導入スピードの差の裏には、両陣営が採用している「世界を認識するためのアプローチ(技術)」の根本的な違いがあります。
1. ホンダ・Waymo陣営:「LiDAR+高精度3Dマップ」方式
Waymoやホンダが採用しているのは、レーザー光を使って周囲の物体との距離を正確に測るセンサー「LiDAR(ライダー)」と、事前に作成した「数センチ単位の高精度な3D地図データ(HDマップ)」を組み合わせる方式です。
- メリット: 事前に地図があるため、見通しの悪い交差点や複雑な道路形状でも、システムが「今どこにいて、次にどう動くべきか」を極めて正確かつ安全に予測できます。
- デメリット: 高価なLiDARセンサーが必要な点と、「高精度マップが作成されたエリア(限られた範囲)でしか走行できない」という制約があります。
2. テスラ陣営:「カメラ(Vision)+AI」方式
一方、テスラは高価なLiDARや事前マップを一切捨て、車両に搭載された「カメラの映像」だけを頼りに、AI(エンドツーエンドのニューラルネットワーク)が人間の目と脳のように判断して運転する「Tesla Vision」方式を採用しています。
- メリット: 事前マップに依存しないため、理論上は「世界中どこに持っていっても、初めて走る道でも自動運転が可能」という圧倒的な拡張性を持ちます。
- デメリット: 人間のように「見て判断する」ため、東京のような道幅が極端に狭く、歩行者や自転車が複雑に交差する「学習データが少ない特異な環境」への適応に膨大なAIの再学習時間が必要になります。
スポンサーリンク
なぜテスラFSDは日本で遅れているのか?
結論から言えば、「日本の道路事情が、テスラのAIにとって未経験すぎるから」です。
事前マップを用意して「決められたルートを極めて正確に走る」Waymo陣営に対し、テスラは「どんな道でも走れるAI」を育てている最中です。アメリカの広くて規則的な道路で学習したテスラのAIにとって、日本の「狭い路地」「電柱の乱立」「複雑な交差点」は非常に難易度が高く、ローカライズ(日本向けのAI学習)に時間を要しているのが現状です。
結論:今後の覇権を握るのは?
現在、私自身もテスラの購入を真剣に検討していますが、一人のユーザーとして「完全自動運転(FSD)」の実用化には大きな期待を寄せています。
今年(2026年)中には何らかの形で日本の公道でも使えるようになってほしいと強く願っています。特に、運転者が常に前方を注視する必要がない「本物のレベル4」が早く日本にも来てほしいところです。
Waymo陣営とテスラ陣営、最終的にどちらが覇権を握るかについてですが、長期的にはテスラ陣営のアプローチが勝利する気がしています。Waymoのような「LiDAR+高精度マップ」方式は、とにかく事前のマップ準備が大変ですし、常に道路状況の変化に合わせて最新データへ更新し続ける維持コストが膨大になるからです。
どんな道でもカメラの視覚情報だけで走り抜けるテスラのAIが、日本の複雑な道に完全適応した時こそが、モビリティにおける本当のゲームチェンジャーになるのではないでしょうか。
### 🔗 関連する最新テクノロジー&テスラ特集
最新のAI技術やモビリティの未来、そして実際にテスラを購入する際に役立つ情報はこちら!
- 内部リンク: 【2026年5月版】テスラ購入ガイド:補助金127万円
- 内部リンク: 【テスラ特集】維持費の真実:人気ミニバンと徹底比較
- 内部リンク: 【2026年最新】エージェントAIとは?OSI規格とOS統合で激変する「自動化」の未来


コメント